





")


El objeto es capaz de realizar observaciones e interacciones cercanas con el ecosistema marino sin perturbar a los peces de verdad. Ya es probado en el centro Rainbow Reef en el país oceánico Fiji
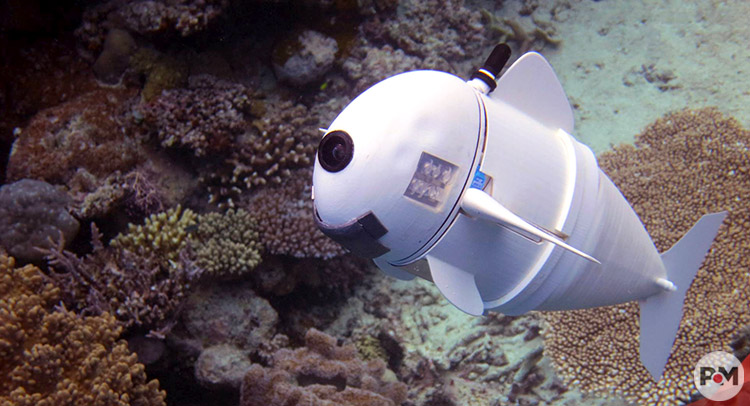
Un equipo del Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL) del Massachusetts Institute of Technology (MIT) han desarrollado un pez robótico, hecho de silicona, que puede nadar independientemente junto con peces reales en el océano, cuyo objetivo es documentar de cerca la vida marina. El proyecto cuenta con el apoyo de la National Science Foundation (NSF).
El pez, al que han denominado “SoFi”, ya ha sido probado en el centro Rainbow Reef en Fiji, donde nadó a profundidades de más de 50 pies durante 40 minutos, manejando ágilmente las corrientes y tomando fotos y videos de alta resolución usando una lente “ojo de pez”.
Utilizando su cola ondulada y una capacidad única para controlar su propia flotabilidad, “SoFi” puede nadar en línea recta, girar o bucear hacia arriba o hacia abajo. El equipo también utilizó un controlador de Super Nintendo a prueba de agua y desarrolló un sistema de comunicación acústica personalizado que les permitió cambiar la velocidad a “SoFi” y hacer que realice movimientos y giros específicos.
“Hasta donde sabemos, este es el primer pez robótico que puede nadar sin ataduras en tres dimensiones durante largos periodos de tiempo”, dice el candidato al doctorado de CSAIL Robert Katzschmann, autor principal del nuevo artículo de revista publicado esta semana en Science Robotics. “Estamos entusiasmados con la posibilidad de poder utilizar un sistema como este para acercarnos a la vida marina de lo que los humanos pueden hacer por sí mismos”, añade.
En contraste con vehículos subacuáticos autónomos (AUV), “SoFi” tiene una configuración mucho más simple y liviana, con una sola cámara, un motor y la misma batería de polímero de litio que se encuentra en los smartphones. Para hacer que el robot nade, el motor bombea agua en dos cámaras parecidas a globos en la cola del pez que funcionan como un conjunto de pistones en un motor. A medida que una cámara se expande, se dobla y flexiona hacia un lado; cuando los actuadores empujan agua al otro canal, éste se dobla y flexiona en la otra dirección.
Estas acciones alternas crean un movimiento de lado a lado que imita el movimiento de un pez real. Al cambiar sus patrones de flujo, el sistema hidráulico permite diferentes maniobras de cola que dan como resultado un rango de velocidades de nado, con una velocidad promedio de aproximadamente la mitad de la longitud corporal por segundo.
“Los autores muestran una serie de logros técnicos en fabricación, potencia y resistencia al agua que permiten que el robot se mueva bajo el agua sin atadura”, dice la profesora de biorrobótica en la Escuela de Estudios Avanzados Sant’Anna en Pisa (Italia), Cecilia Laschi. “Un robot como este puede ayudar a explorar el arrecife más de cerca que los robots actuales, porque puede acercarse más de forma segura al arrecife y porque puede ser mejor aceptado por las especies marinas”, señala.
Toda la mitad posterior de “SoFi” está hecha de caucho de silicona y plástico flexible, y varios componentes están impresos en 3D, incluida la cabeza, que contiene todos los componentes electrónicos.
Texto: Agencias